Find the shortest path between start and end points within a polygon
Source:R/cnt_path.R
cnt_path.RdFind the shortest path between start and end points within a polygon
Arguments
- skeleton
an output from
cnt_skeleton()function- start_point
one or more starting points. It should be of the same class as the
skeletonparameter- end_point
one ending point of the same class as
skeletonandstart_pointparameters.
Details
The function connects start and end points with weighted shortest paths
on an undirected skeleton graph using igraph::shortest_paths().
The skeleton of a closed polygon provides the potential routes.
It is important to note that multiple starting points are permissible, but there can only be one ending point. Should there be two or more ending points, the algorithm will return an error.
Neither starting nor ending points are required to be located on the edges of a polygon (i.e., snapped to the boundary); they can be positioned wherever possible inside the polygon.
By default, the algorithm identifies the closest nodes of the polygon's
skeleton to the starting and ending points and then connects them using the
shortest path possible along the skeleton. Therefore, if more precise
placement of start and end points is necessary, consider executing
cnt_skeleton() with keep = 1. In doing so, the resulting
skeleton may be more detailed, increasing the likelihood that the starting
and ending points are already situated on the skeleton paths.
For exact boundary terminals, pass the same boundary points to
cnt_skeleton() as anchors. Those anchors become degree-one graph
nodes, so cnt_path() returns zero endpoint distance from the supplied
points rather than nearest-node snaps.
Every start point's nearest skeleton node must be connected to the end
point's nearest node. Using anchors in cnt_skeleton() ensures that
terminal nodes exist, but it does not make a multi-component skeleton
globally connected. If any requested route is empty, cnt_path() stops
without returning partial paths.
Examples
library(sf)
#> Linking to GEOS 3.12.1, GDAL 3.8.4, PROJ 9.4.0; sf_use_s2() is TRUE
library(geos)
# Load Polygon and points data
polygon <-
sf::st_read(
system.file("extdata/example.gpkg", package = "centerline"),
layer = "polygon",
quiet = TRUE
) |>
geos::as_geos_geometry()
points <-
sf::st_read(
system.file("extdata/example.gpkg", package = "centerline"),
layer = "polygon_points",
quiet = TRUE
) |>
geos::as_geos_geometry()
# Find polygon's skeleton
pol_skeleton <- cnt_skeleton(polygon)
# Connect points (nearest-node snapping)
pol_path <-
cnt_path(
skeleton = pol_skeleton,
start_point = points[2],
end_point = points[1]
)
# Exact boundary terminals via anchors
boundary <- geos::geos_boundary(polygon)
is_boundary <- geos::geos_equals(
geos::geos_intersection(boundary, points),
points
)
anchors <- points[is_boundary]
anchored_skeleton <- cnt_skeleton(polygon, keep = 1, anchors = anchors)
anchored_path <- cnt_path(anchored_skeleton, anchors[1], anchors[2])
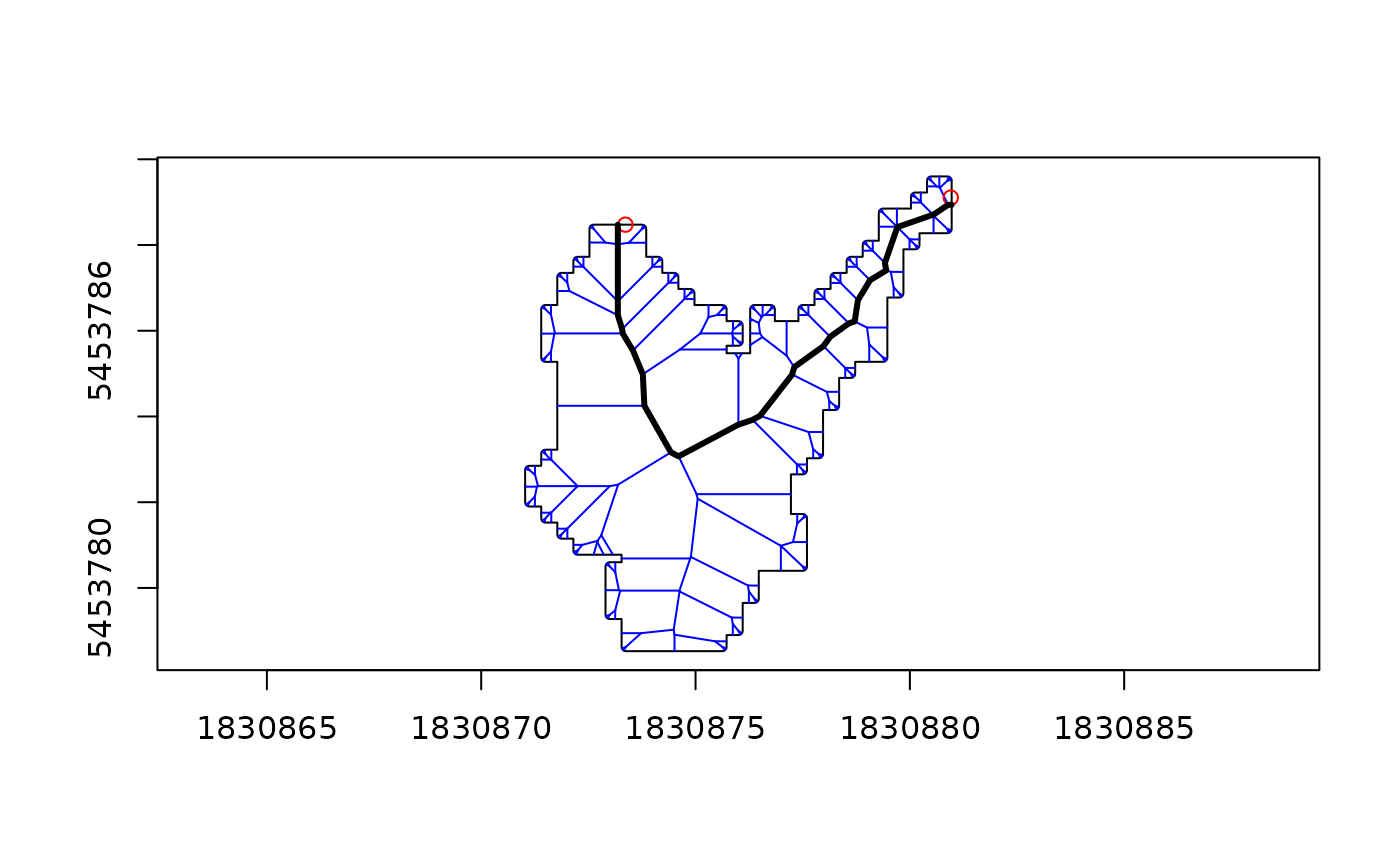
# Plot
plot(polygon)
plot(pol_skeleton, col = "blue", add = TRUE)
plot(points[1:2], col = "red", add = TRUE)
plot(pol_path, lwd = 3, add = TRUE)